TeleSorting System – F1
ระบบจัดเรียงของระยะไกล ระบบที่ 1
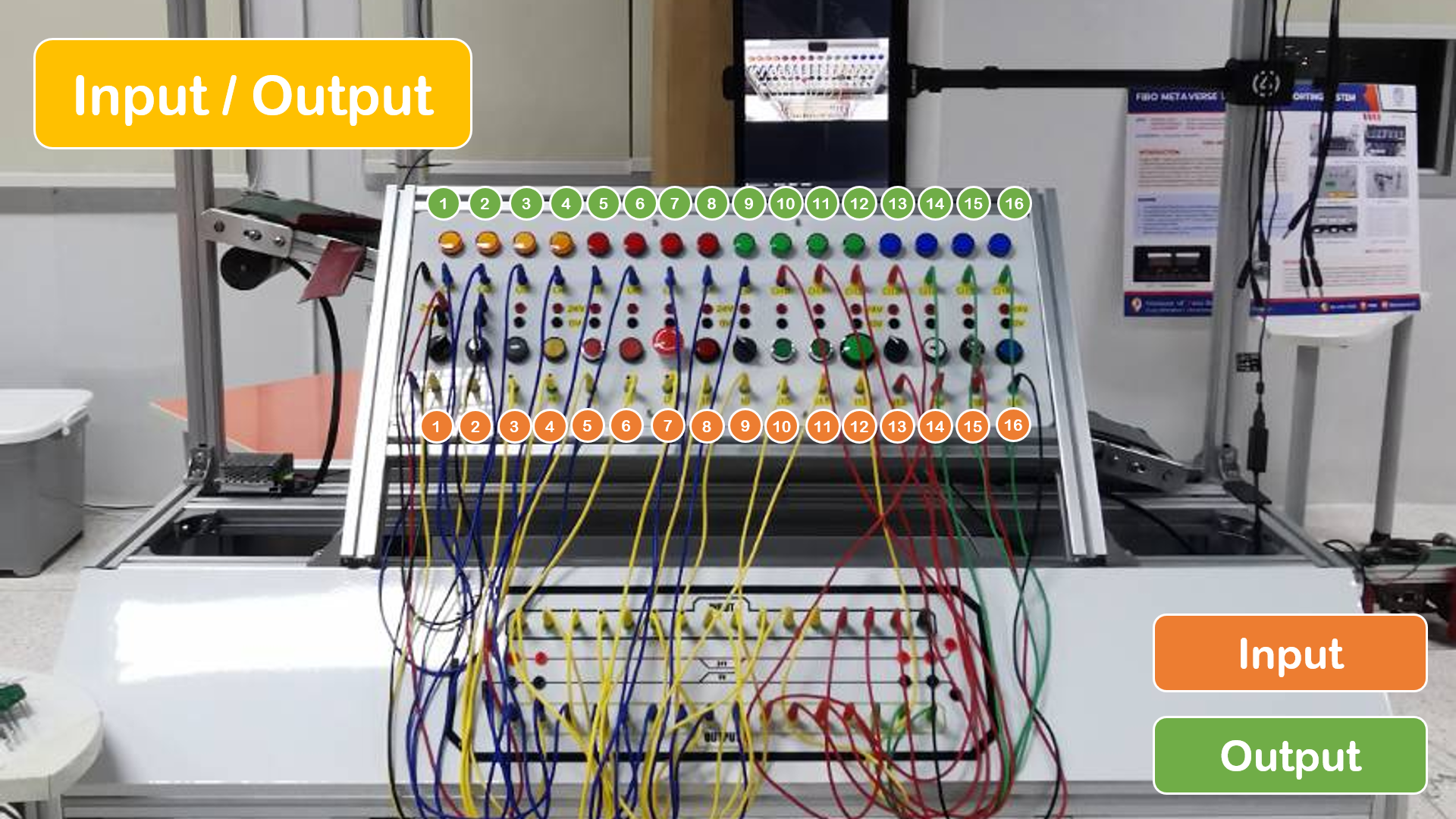
การทำงานของระบบประกอบไปด้วย Input กับ Output โดยให้ผู้ใช้ทำหน้าที่เขียนโค้ด ในการประมวลผลและสร้างผลลัพธ์ที่ต้องการ

TeleSorting System – F2
ระบบจัดเรียงของระยะไกล ระบบที่ 2
การทำงานของระบบประกอบไปด้วย Input กับ Output โดยให้ผู้ใช้ทำหน้าที่เขียนโค้ด ในการประมวลผลและสร้างผลลัพธ์ที่ต้องการ

Input/Output of TeleSorting System - F1
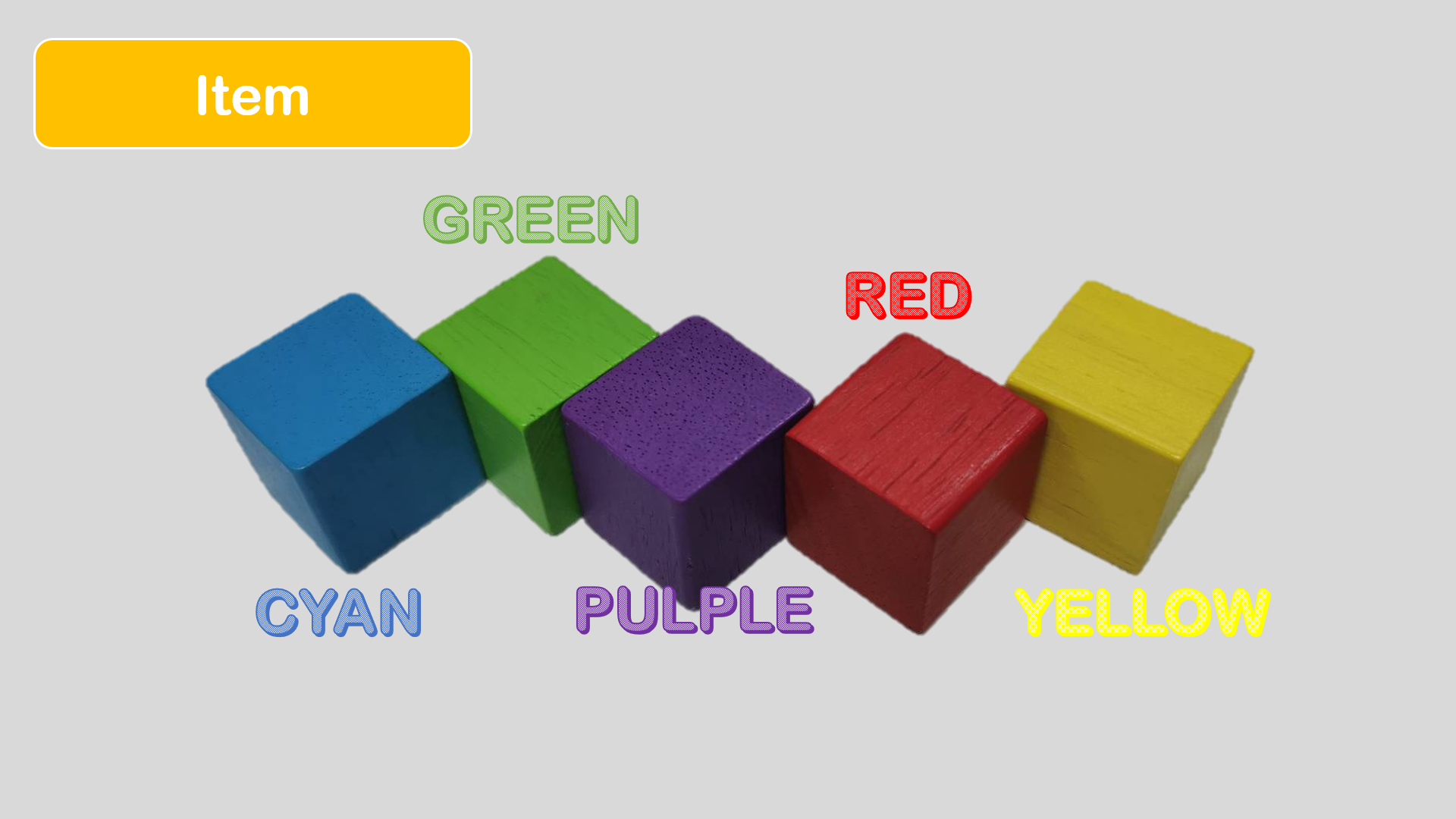
Item of TeleSorting System - F1
Input/Output of TeleSorting System - F2
API Document
General Information
แสดงข้อมูล TeleSorting System
Parameters
https://smartfactory.hcilab.net/api/telesorting-system/ ที่อยู่ของระบบ TeleSorting
TSS Information
อ่านข้อมูลสถานะ (Status) ของระบบจัดเรียงของระยะไกลว่ามีสถานะพร้อมทำงานหรือไม่โดยใช้
Parameters
https://smartfactory.hcilab.net/api/telesorting-system/ ที่อยู่ของระบบ TeleSorting
tss_id หมายเลขระบบจัดเรียงของระยะไกลที่ต้องการอ่านค่าในระบบนี้ให้เท่ากับ 0 **[tss1=0],[tss2=1]
Responses
API จะตอบกลับข้อมูล Status ของระบบจัดเรียงของระยะไกลในรูปแบบ JSON ดังนี้
{
"id": 0,
"status": "online",
"latency": 50,
"number of sensor": 31,
"number of actuator": 10
}
Parameters
- id หมายเลขระบบจัดเรียงของระยะไกล
- status สถานะระบบจัดเรียงของระยะไกล มีค่า online หรือ offline
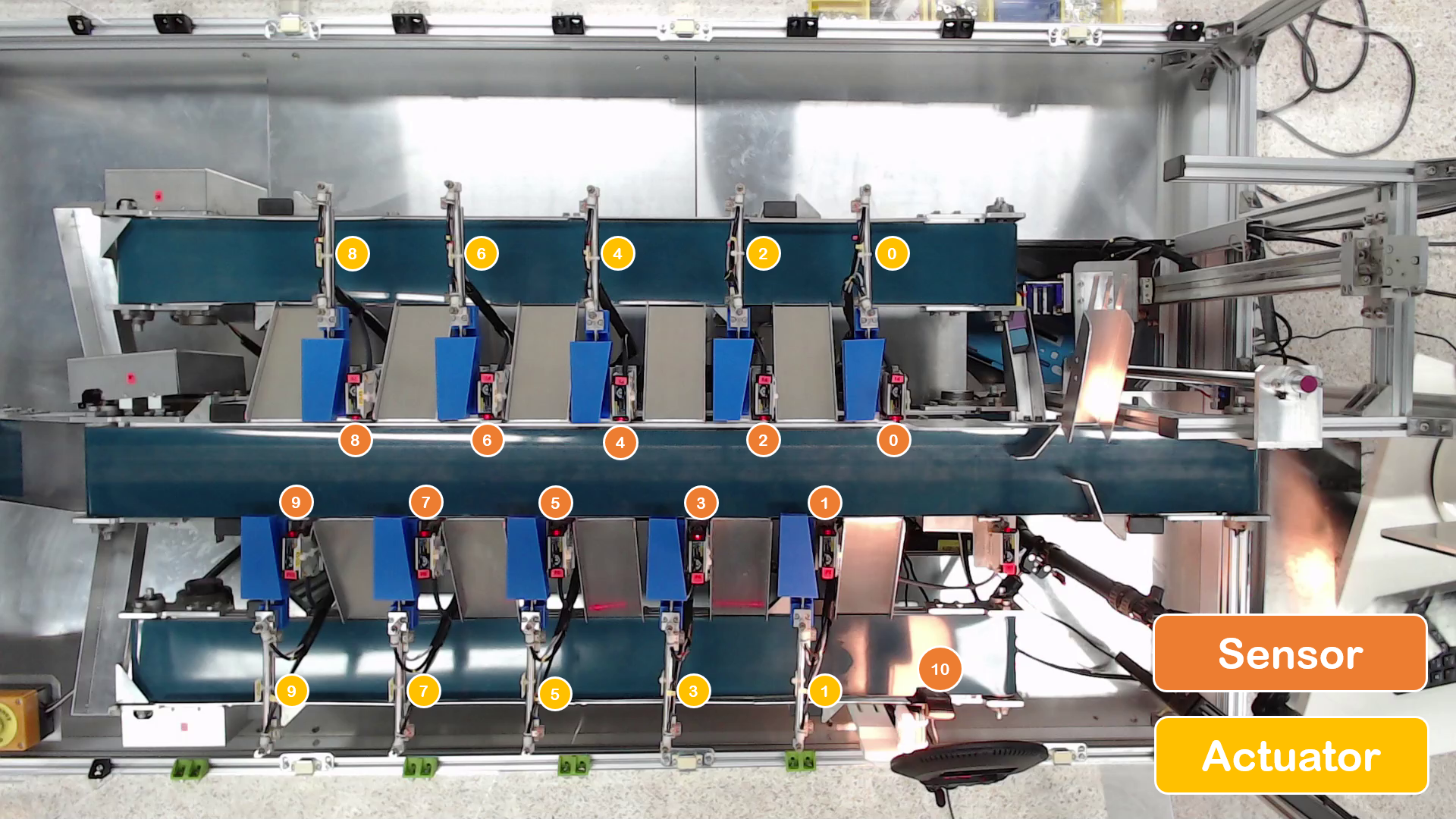
Sensor Information
อ่านข้อมูล Sensor ที่ได้จากระบบจัดเรียงของระยะไกล โดยใช้ GET Method ด้วย URL ดังนี้
Parameters
https://smartfactory.hcilab.net/api/telesorting-system/ ที่อยู่ของระบบ TeleSorting
tss_id หมายเลขระบบจัดเรียงของระยะไกลที่ต้องการอ่านค่า ในระบบนี้ให้เท่ากับ 0 **[tss1=0],[tss2=1]
sensor_id หมายเลขของ Sensor ในระบบจัดเรียงของระยะไกล
Guide
API จะตอบกลับข้อมูล Sensor ของระบบจัดเรียงของระยะไกลในรูปแบบ JSON ดังนี้
Parameters
id หมายเลข Sensor
type ประเภทของ Sensor
value ข้อมูลการตรวจจับชิ้นงานของ Sensor
detail ข้อมูลรายละเอียดเพิ่มเติม
การสั่งงานอุปกรณ์ขับเคลื่อนใน TeleSorting System
ควบคุมการทำงาน Actuator จำนวน 1 ตัว ที่อยู่ในระบบจัดเรียงของระยะไกล โดยใช้ POST Method ด้วย URL ดังนี้
Parameters
https://smartfactory.hcilab.net/api/telesorting-system/ ที่อยู่ของระบบ TeleSorting
tss_id หมายเลขระบบจัดเรียงของระยะไกลที่ต้องการอ่านค่า ในระบบนี้ให้เท่ากับ 0 **[tss1=0],[tss2=1]
actuator_id หมายเลขของ Actuator ในระบบจัดเรียงของระยะไกล
Guide
ข้อมูล (Body) ที่ต้องส่งเพื่อควบคุมการทำงาน Actuator จะอยู่ในรูปแบบ JSON ดังนี้
Parameters
value คำสั่งควบคุม Actuator โดย
1 ดันก้านกระบอกลมออก (Extend)
0 ดึงก้านกระบอกลมกลับ (Retract)